



Computer vision
A computer vision system captures images and then manipulates, changes, or enhances them for a given application. In a 3D computer vision system, the visible scene image is no longer a flat picture (2D).
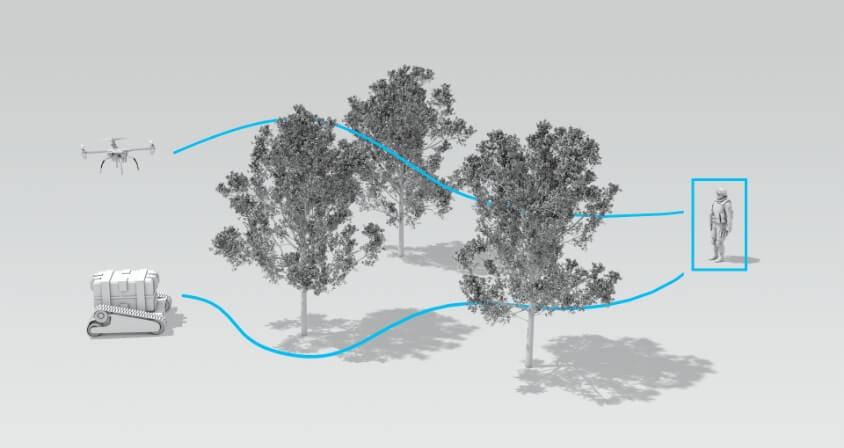
Navigation and localization
Navigation is the ability to get to the right place at the right time. Localization is the robot’s ability to know where it is in space at any given time, and as such is a prerequisite for successful navigation.